複素数の極形式と回転
実空間における座標の表し方には, 直交座標表示と極座標表示がありますが, 複素数も, 直交座標で表す方法と極座標で表す方法があります.
複素数を極座標っぽく表すことを極形式と言い, 複素平面上の点の回転等々を考えるのに便利ですので, ここで解説していきます.
Table of Contents
三角関数による複素数の表示 (極形式)
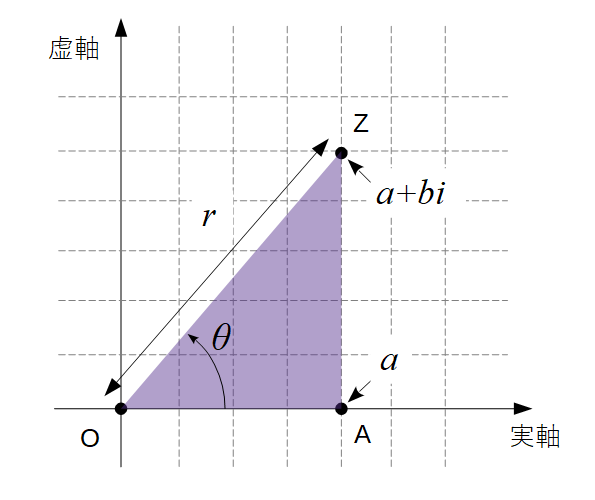
複素平面上に下図のような直角三角形OAZを考えます.
複素平面については前回記事で解説しています.
点Zは複素数 \( \dot{z} =a+bi \) を表し, 点Aは点Zから実軸に引いた垂線の足なので, OAの長さは \( \dot{z} \) の実部を表しています.
斜辺OZの長さを \( r \), OZと実軸のなす角を \( \theta \) とします.
このとき, 直角三角形OAZについて, 三角関数の定義から,
\begin{eqnarray} \cos{\theta} &=& a / r \\ \sin{\theta} &=& b / r \end{eqnarray}
です.
\( a , b \) を \( r \) と \( \theta \) で表すと,
\begin{eqnarray} a &=& r \cos{\theta} \\ b &=& r \sin{\theta} \end{eqnarray}
よって, \( z=r \, \left( \cos{\theta} + i \sin{\theta} \right) \) と表すことができ, これを複素数 \( \dot{z} \) の極形式と呼びます.
また, 三平方の定理から, \( a , b \) と \( r \) の間には以下のような関係があることが分かります.
$$ a^2 + b^2 = r^2 (\sin^2 \rm{\theta} + \cos^2 \rm{\theta}) = r^2 $$
$$ r = \sqrt{a^2 + b^2}$$
同様に, 逆三角関数を使うと, \( \theta \) を以下のように表すことができます.
$$ \frac{b}{a} = \frac{\sin{\theta}}{\cos{\theta}} = \tan{\theta}$$
$$ \theta = \arctan{(b \, /a)} $$
回転

\( \dot{z_1} = r_1 \, (\cos{\theta _1} +i \sin{\theta _1} ) \) と \( \dot{z_2} = r_2 \, (\cos{\theta _2} +i \sin{\theta _2} ) \) という2つの複素数の掛け算について考えます.
\begin{eqnarray} \dot{z_1} \times \dot{z_2} &=& r_1 \times r_2 \times (\cos{\theta _1 + i \sin{\theta _1}}) \times (\cos{\theta _2} + i \sin{\theta _2}) \\ &=& r_1 r_2 \, \left( \cos{\theta _1} \cos{\theta _2} – \sin{\theta _1} \sin{\theta _2} + i \, (\sin{\theta _1} \cos{\theta _2} + \cos{\theta _2} \sin{\theta _1}) \right) \\ &=& r_1 r_2 \, \left( \cos{(\theta _1 + \theta _2) + i \sin{(\theta _1 + \theta _2)}} \right) \end{eqnarray}
となりました.
この計算結果を複素平面上で見てみましょう.
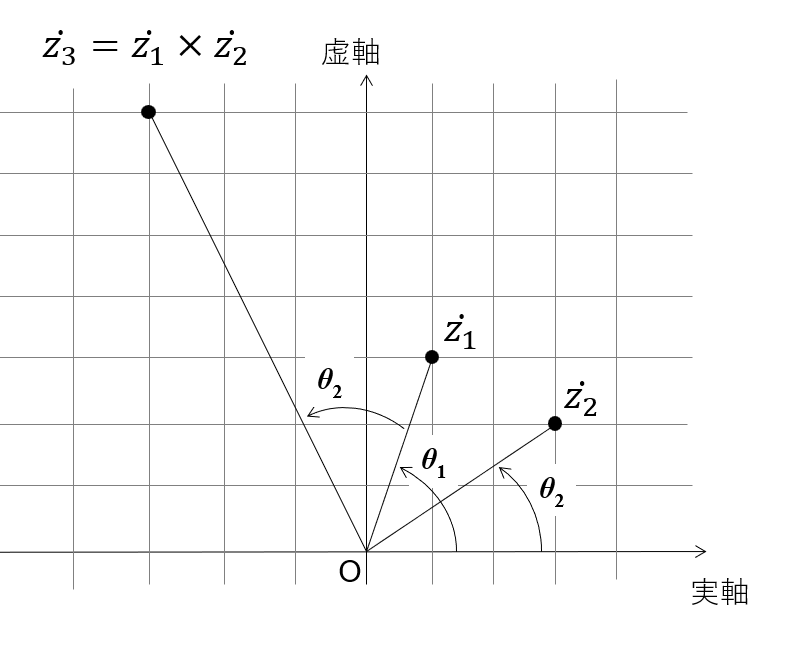
\( \dot{z_1} \) と \( \dot{z_2} \) の積を \( \dot{z_3} \) とすると, 複素平面上の \( \dot{z_3} \) の原点からの距離は \( r_1 \times r_2 \) となり, 位相は \( \theta _1 \) から \( \theta _2 \) 進んで, \( \theta _1 + \theta _2 \) となります. 複素数の掛け算は複素平面上の点の回転を表しているのです.
絶対値が \( 1 \) である複素数を掛けた場合には, 位相のみが変化します. 位相が \( 0 \) である複素数 (すなわち実数)を掛けた場合には, 位相は変化せずに原点からの距離のみが変化します.
まとめ
極形式を使って複素数を表すと, 複素数同士の積を「回転」として捉えることが可能です.